冲压机械手的工作原理
发布日期:
2020-11-03
浏览人气:
0
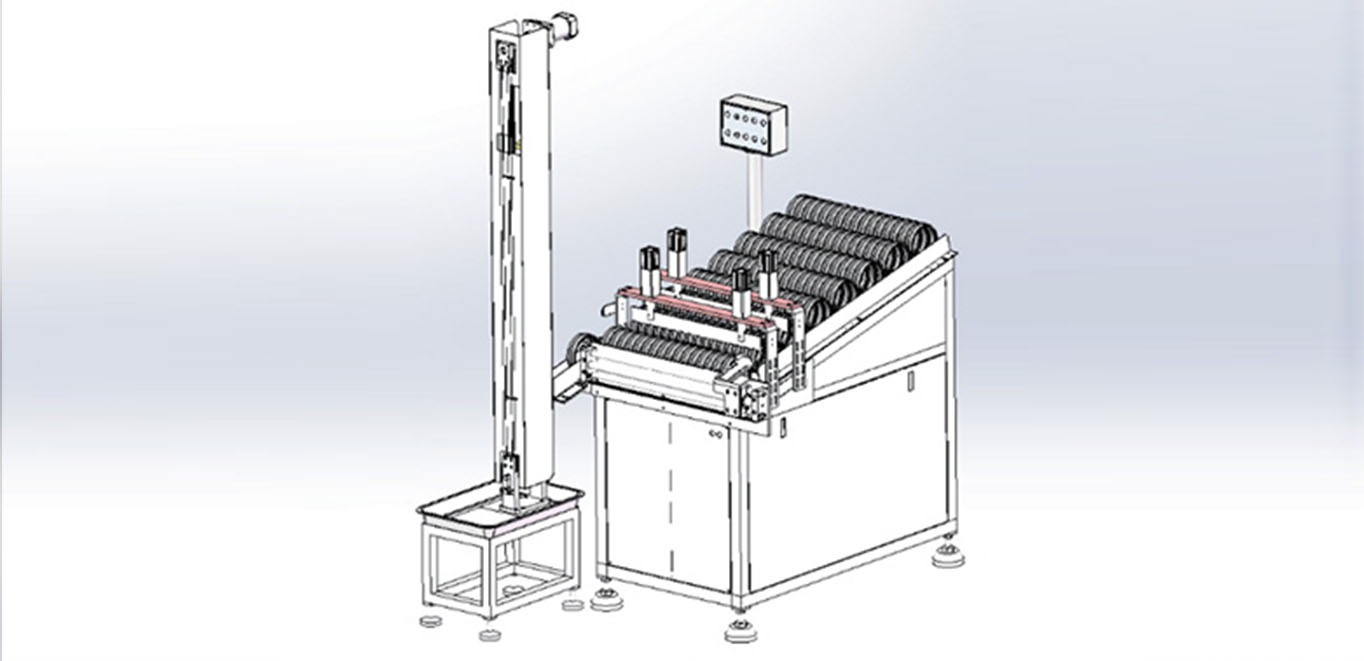
冲压机械手的一部分被加工成齿条与齿轮啮合。当冲压机械手伸缩缸人推动活塞杆作往复运动时,齿轮在固定齿条上滚动,从而驱动冲压机械手以杆的两倍速度作伸缩运动。气缸是一个摆冲压机械手气缸,它推动齿条作往复运动,使齿轮转动,使整个摆冲压机械手部分左右摆动。手指的上下运动由手指提升油缸推动。这里,手指是三个气流负压吸盘。当吸盘下降并压在薄板上时,压缩空气进入喷嘴,吸盘即将吸入薄板;切断气源,薄板将下落。
当压力机的滑块向下移动时,机械手吸料(图中两点链线所示的状态)。吸食后,手指抬起,手冲压机械手逆时针方向摆动,等待喂食。当滑块到达底部死点时,冲压机械手伸缩油缸移动,冲压机械手开始向前伸展。滑块升起后,手指将板材放入模具中心位置,将板材放入模具中,然后手冲压机械手开始转动。缩回,当一定距离后,摆冲压机械手油缸开始移动,使摆冲压机械手顺时针摆动,同时继续缩回。当冲压机械手完全缩回时,允许滑块下降。当手指到达存储桶顶部时,手冲压机械手停止摆动,手指伸缩气缸开始移动,手指降低吸盘,开始下一个循环。
板材存放在储料筒内,支撑板可在下方升降。支撑板的升降由皮带传动驱动的小电机和蜗轮副带动丝杠转动来实现。非接触式行程开关安装在储物筒的上端。随着板材的不断去除,堆垛的高度逐渐降低。当堆垛上平面低于非接触开关时,小电机启动托盘上升,当堆垛上升到一定高度时,非接触开关再次断电。堆栈停止上升,因此堆栈的上平面始终处于手指可以到达的高度。在储物筒的上边缘还安装了两块永磁体,用同一磁场相互排斥,使最上层相邻的块体相互分离,避免同时吸两块体。这种方法只对铁磁材料有效。