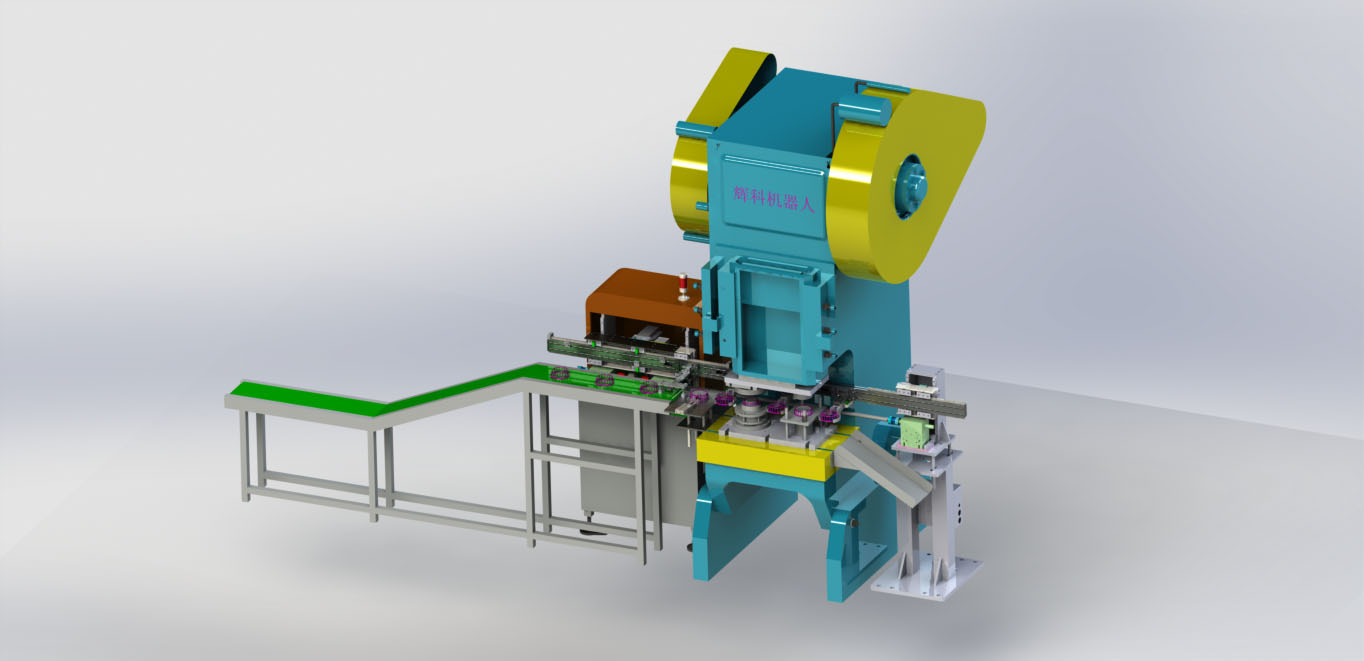
冲压机械手的结构
随着网络技术和机器人技术的发展,以及生产过程机械化和自动化水平的提升, 目前,工业机器人在制造业中的应用不断扩大。
冲床机械手的执行机构分为手部、手臂、躯干。
1、手部
手部安装在手臂的前端。手臂的内孔中装有传动轴,可把运用传给手腕,以转动、伸曲手腕、开闭手指。
冲压机械手手部的构造系模仿人的手指,分为无关节、固定关节和自由关节3种。手指的数量又可分为二指、三指、四指等,其中以二指用的最多。可根据夹持对象的形状和大小配备多种形状和大小的夹头以适应操作的需要。所谓没有手指的手部,一般都是指真空吸盘或磁性吸盘。
2、手臂
冲压机械手的手臂的作用是引导手指准确地抓住工件,并运送到所需的位置上。为了使冲床机械手能够正确地工作,手臂的3个自由度都要精确地定位。
3、躯干
躯干是安装手臂、动力源和各种执行机构的支架。